
Enabling Close Proximity Human Robot Collaboration via Distributed, Self-Calibrating Robotic Skin
Published in University of Colorado Boulder Undergraduate Thesis in Computer Science, 2021
Abstract:
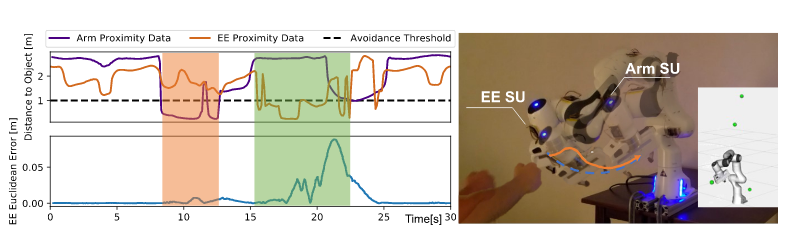
Physical human-robot interaction is slowly transitioning to more human-centric environments, where robots will need to work with and around humans, instead of the other way around. However, prior methods are limited in that they struggle with effective close-proximity interaction. Distributed, whole body sensing has recently emerged as a strong solution for this problem; such sensing enables comprehensive coverage of the robot’s nearby space. However, current solutions lack a certain degree a flexibility and modularity that is necessary for eventual real-world development. This thesis first addresses the lack of a “plug and play” system with the presentation of a detailed framework for calibrating and setting up the sensor units. The proposed framework is accurate and we demonstrate this in simulation and real-life, followed with an obstacle avoidance example that demonstrates the system’s capabilities. Next, this work addresses the lack of a transition between avoidance and contact in close-proximity interactions with a new framework for implicit contact anticipation. This framework, which builds on top of the previous one, is also evaluated in a variety of experimental scenarios to showcase its capabilities. Altogether, this work is a strong step forwards to close-proximity human robot interaction, and will hopefully push research closer to true human robot collaboration.